「N-CG」杂记 01
简介 ¶
简单介绍了一下2D变换的基本概念,以及一些基本的变换矩阵。
文末有一个源于 Computer Vision:
Algorithms and Applications - Richard Szeliski 的表格,总结了2D变换的一些特性。
import numpy as np
from matplotlib import pyplot as plt
from Shape import *0. Base ¶
Note: It’s a 2D base shape. ¶
shape_base = Shape([d(0, 0), d(4, 0), d(3, 2), d(1, 2)], name="Base")
fig, ax = plt.subplots(figsize=FIG_SIZE)
plot_shape_on_ax(ax, shape_base)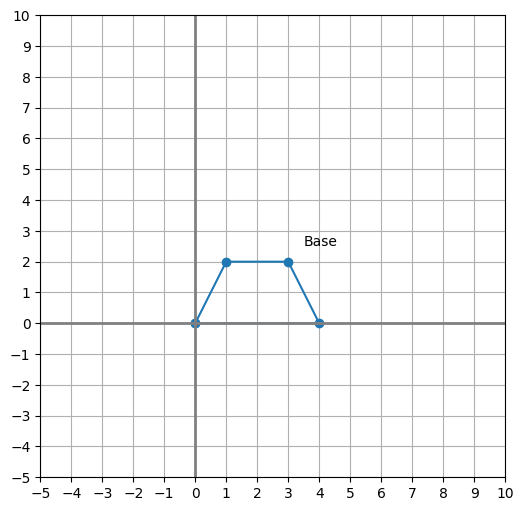
1. Transition ¶
[1, 0, 4],
[0, 1, 2],
[0, 0, 1]Move the point (x, y) to (x+4, y+2)
Note: For transition, we need to expand the base shape to 3D, and apply a 3D transition matrix. ¶
T_transition = np.array([
[1, 0, 4],
[0, 1, 2],
[0, 0, 1]
])
shape_transition = shape_base.be_dotted(T_transition, name="Transition +4, +2")
plot_shapes([shape_base, shape_transition])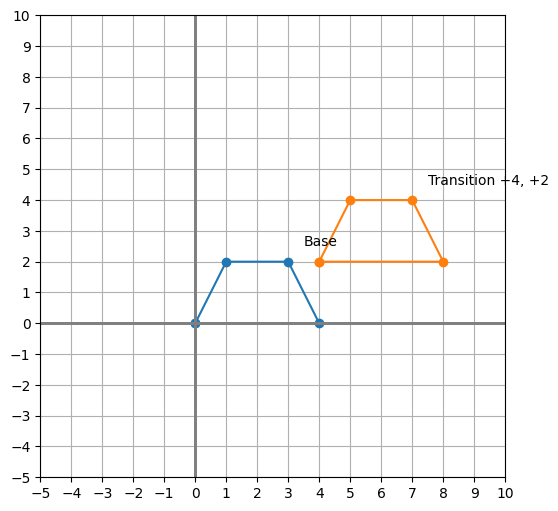
2. Rotation ¶
theta = np.pi/2
[cos(theta), -sin(theta)],
[sin(theta), cos(theta)]Rotate the point (x, y) by 90 degrees counterclockwise
theta = np.pi / 2
T_rigid = np.array([
[np.cos(theta), -np.sin(theta)],
[np.sin(theta), np.cos(theta)]
])
shape_rigid = shape_base.be_dotted(T_rigid, name="R -90°")
plot_shapes([shape_base, shape_rigid])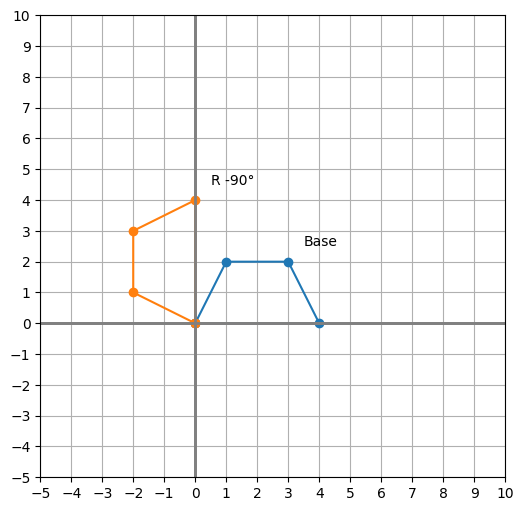
3. Scaling ¶
[2, 0],
[0, 3]Scale the point (x, y) by 2 in the x direction and by 3 in the y direction.
T_scale = np.array([
[2, 0],
[0, 3]
])
shape_scale = shape_base.be_dotted(T_scale, name="Scale 2, 3")
plot_shapes([shape_base, shape_scale])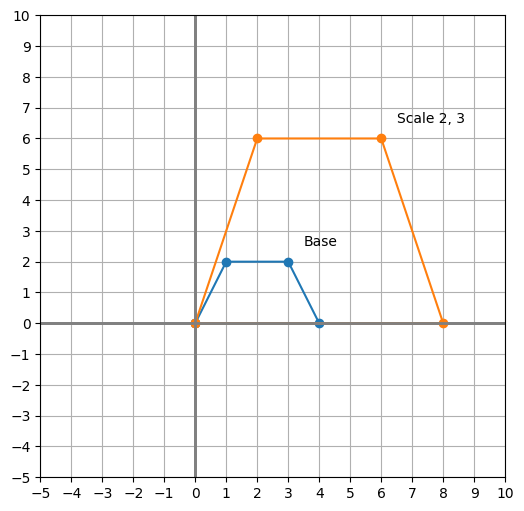
4. Shearing ¶
[1, 2],
[0, 1]e.g.1: Shear the point (x, y) by 2 in the x direction.
[1, 0],
[2, 1]e.g.2: Shear the point (x, y) by 2 in the y direction.
[1, 2],
[2, 1]e.g.3: Shear the point (x, y) by 2 in the x and y direction.
Note: This method is a little bit weried, try understand by calculating the matrix multiplication. ¶
e.g. for T_shear_2,
T_shear_1 = np.array([
[1, 2],
[0, 1]
])
T_shear_2 = np.array([
[1, 0],
[2, 1]
])
T_shear_3 = np.array([
[1, 2],
[2, 1]
])
shape_shear_1 = shape_base.be_dotted(T_shear_1, name="Shear x=2")
shape_shear_2 = shape_base.be_dotted(T_shear_2, name="Shear y=2")
shape_shear_3 = shape_base.be_dotted(T_shear_3, name="Shear x=2, y=2")
plot_shapes([shape_base, shape_shear_1, shape_shear_2, shape_shear_3])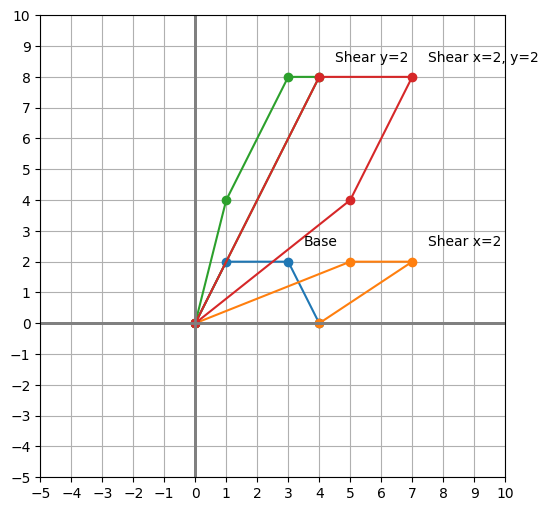
5. Reflection ¶
[1, 0],
[0, -1]Reflect the point (x, y) over the x-axis.
[-1, 0],
[0, 1]Reflect the point (x, y) over the y-axis.
[-1, 0],
[0, -1]T_reflection_1 = np.array([
[1, 0],
[0, -1]
])
T_reflection_2 = np.array([
[-1, 0],
[0, 1]
])
shape_reflection_1 = shape_base.be_dotted(T_reflection_1, name="Reflect x")
shape_reflection_2 = shape_base.be_dotted(T_reflection_2, name="Reflect y")
plot_shapes([shape_base, shape_reflection_1, shape_reflection_2])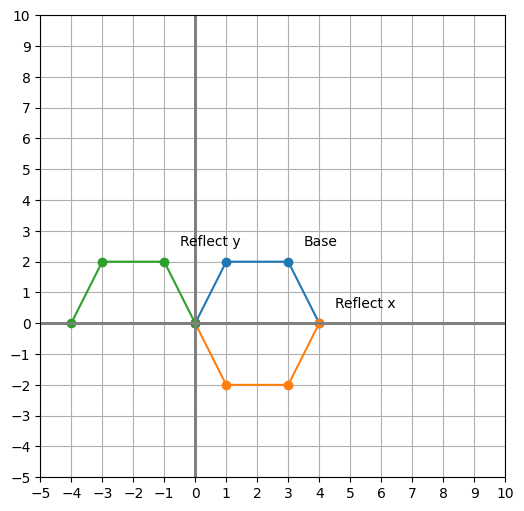
6. Projection ¶
[1, 0],
[0, 0]Project the point (x, y) onto the x-axis.
[0, 0],
[0, 1]Project the point (x, y) onto the y-axis.
T_projection_1 = np.array([
[1, 0],
[0, 0]
])
T_projection_2 = np.array([
[0, 0],
[0, 1]
])
shape_projection_1 = shape_base.be_dotted(T_projection_1, name="Project x")
shape_projection_2 = shape_base.be_dotted(T_projection_2, name="Project y")
plot_shapes([shape_base, shape_projection_1, shape_projection_2])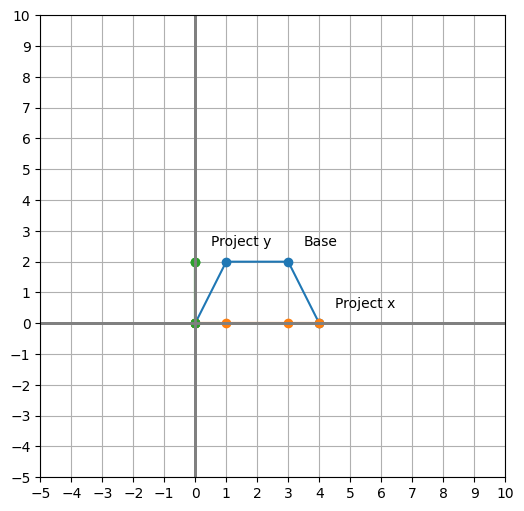
Conclusion ¶
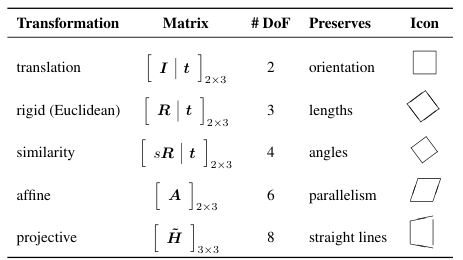
For 2D transformation:
| Transformation | DOF | Preserves | Description |
|---|---|---|---|
| Transition | 2 | Orientation | Move along the x and y axis (2) |
| Rigid (Eucledian) | 3 | Lengths | Transition (2) + Rotation (1) |
| Similarity | 4 | Angles | Rigid (3) + Scaling (1) Note: Scaling is uniform, which means the scaling factor is the same in both x and y direction. |
| Affine | 6 | Parallels | Similarity (4) + Shearing (2) |
| Projective (Homography) | 8 | Ratios | Affine (6) + Projection (2) |
「N-CG」杂记 01
https://siriusahu.github.io.git/2024/02/05/N-CG-Misc01/